 Protocolo de envio
Protocolo de envio
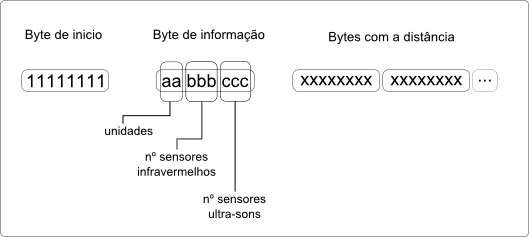
 RCUD_esquema_mensagens
RCUD_esquema_mensagens
 UAN_BASE_MSGs
UAN_BASE_MSGs
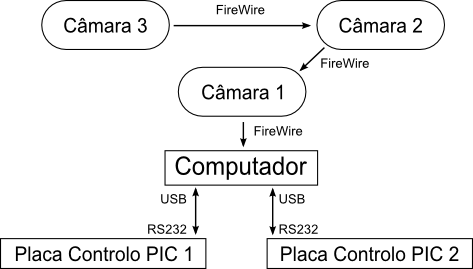
 arquitectura nova
arquitectura nova
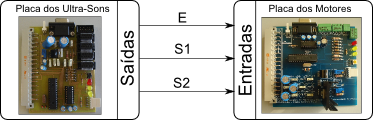
 comunicação placas
comunicação placas
 controlo_alto_nivel
controlo_alto_nivel
 controlo_baixo_nivel_1
controlo_baixo_nivel_1
 controlo_baixo_nivel_2
controlo_baixo_nivel_2
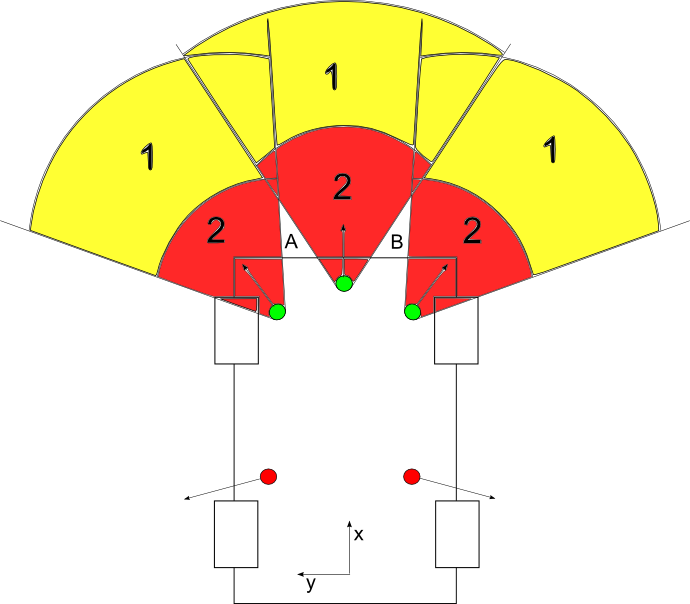
 distancias_obstaculos
distancias_obstaculos
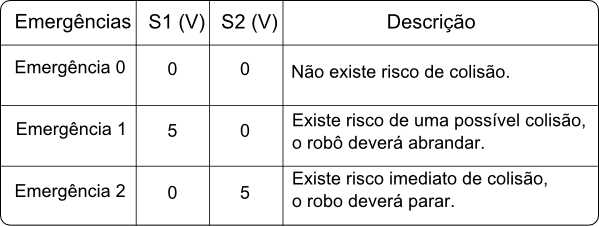
 emergencias_distancias
emergencias_distancias
 esquema_alimentação
esquema_alimentação
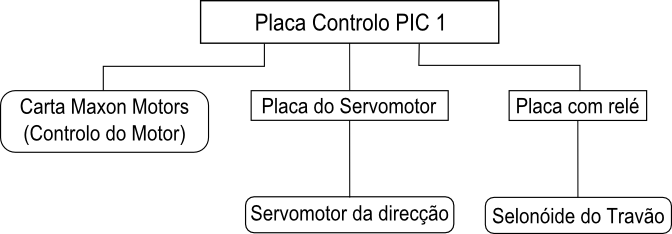
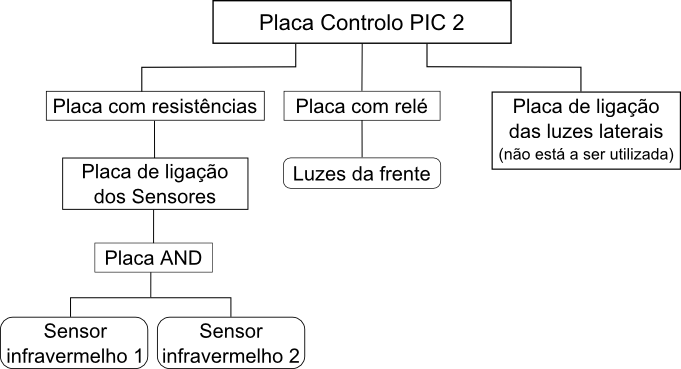
 ligação das placas_sist_anti-colisão
ligação das placas_sist_anti-colisão
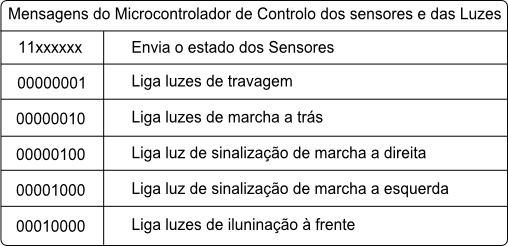 mensagens pic Luzes
mensagens pic Luzes
 mensagens pic US
mensagens pic US
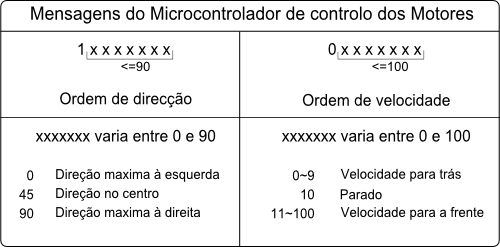 mensagens pic motor
mensagens pic motor
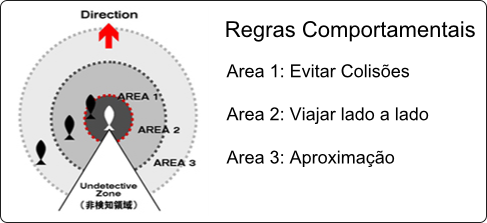 regras dos peixes
regras dos peixes
 regras_heuristicas
regras_heuristicas
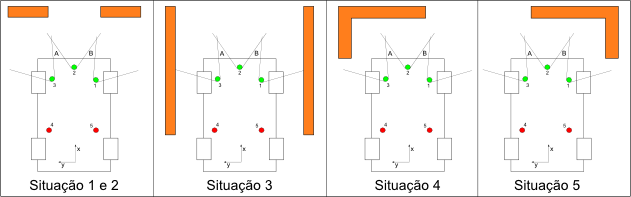
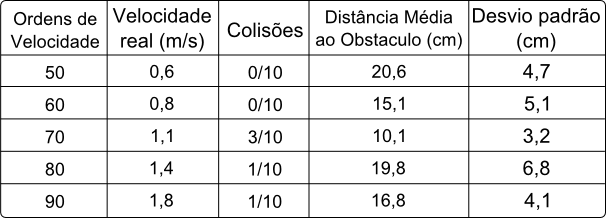 resultados_anticolisão
resultados_anticolisão
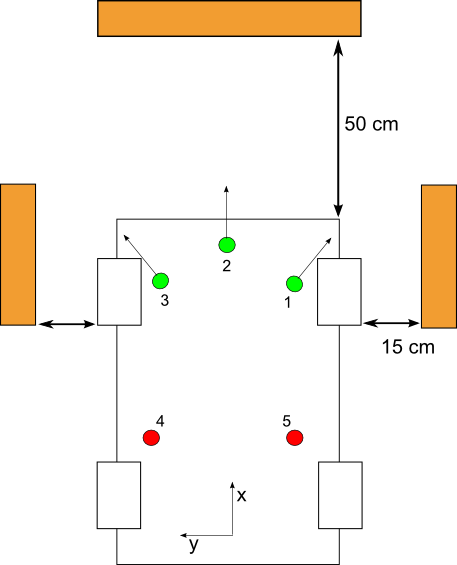
 sensors position
sensors position
 sist.aux.navegação
sist.aux.navegação
 testes_Sistema-aux_navegação
testes_Sistema-aux_navegação
 tipos emergencias e condições de activação
tipos emergencias e condições de activação